This project was developed as part of a technical design course during a semester of my industrial design studies. The aim was to develop an autonomous vehicle that can master a given obstacle course without external control.
The obstacles consist of an ascending and a descending ramp, between which there is an area of stanchions and a ditch that have to be overcome. In addition, no parts may be left behind, such as a laid-out bridge that was previously carried along with the vehicle.
The obstacles consist of an ascending and a descending ramp, between which there is an area of stanchions and a ditch that have to be overcome. In addition, no parts may be left behind, such as a laid-out bridge that was previously carried along with the vehicle.

Concept
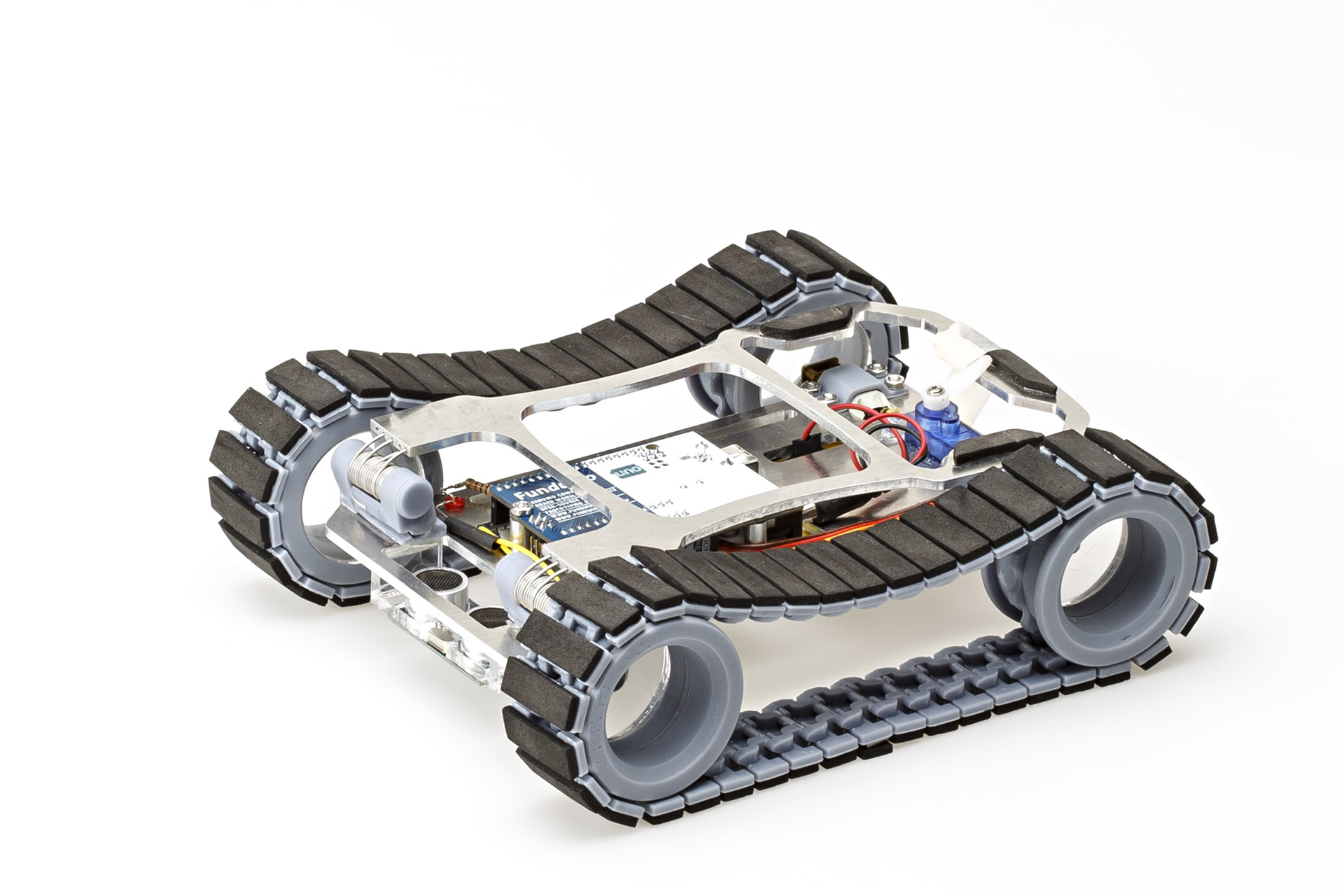
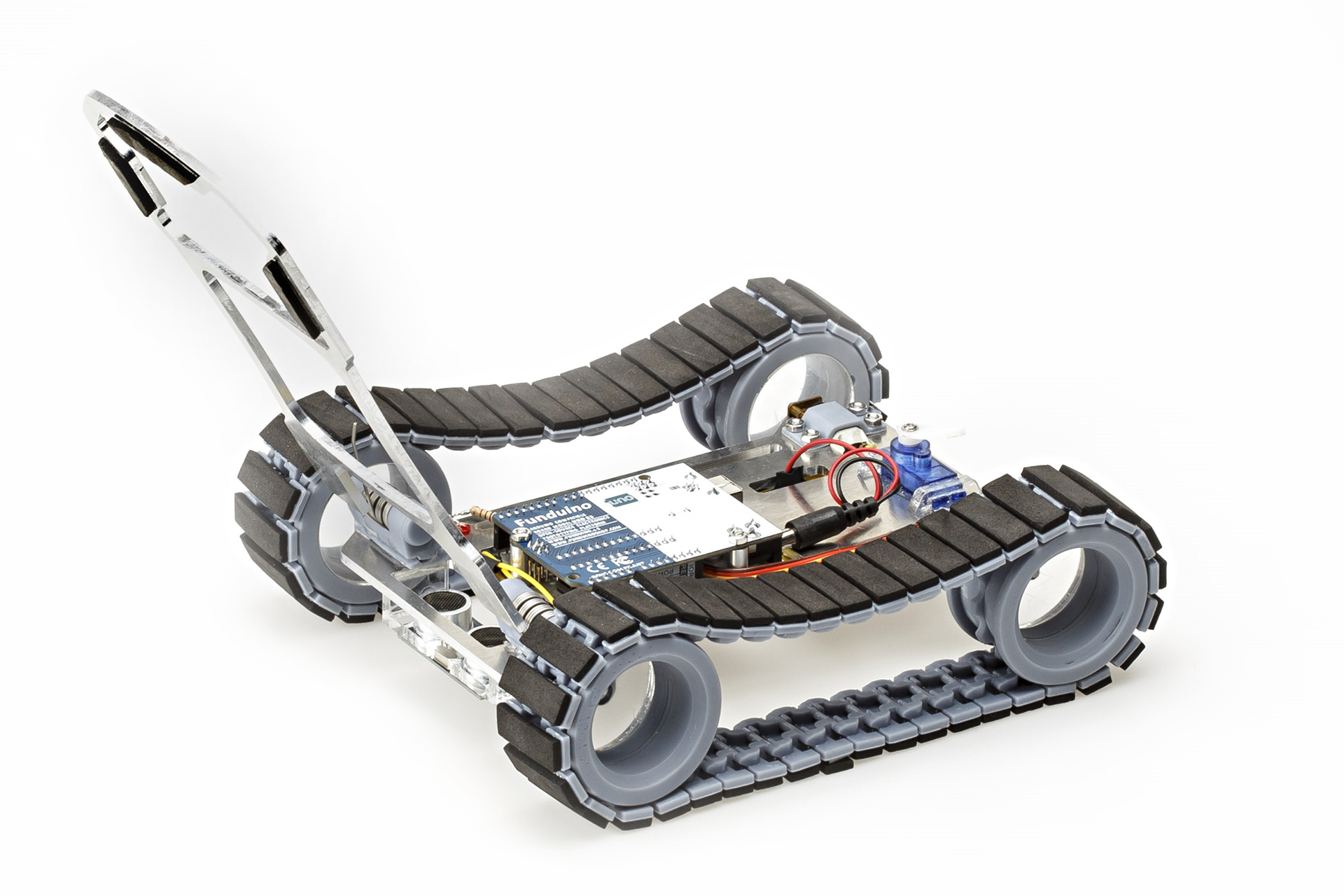
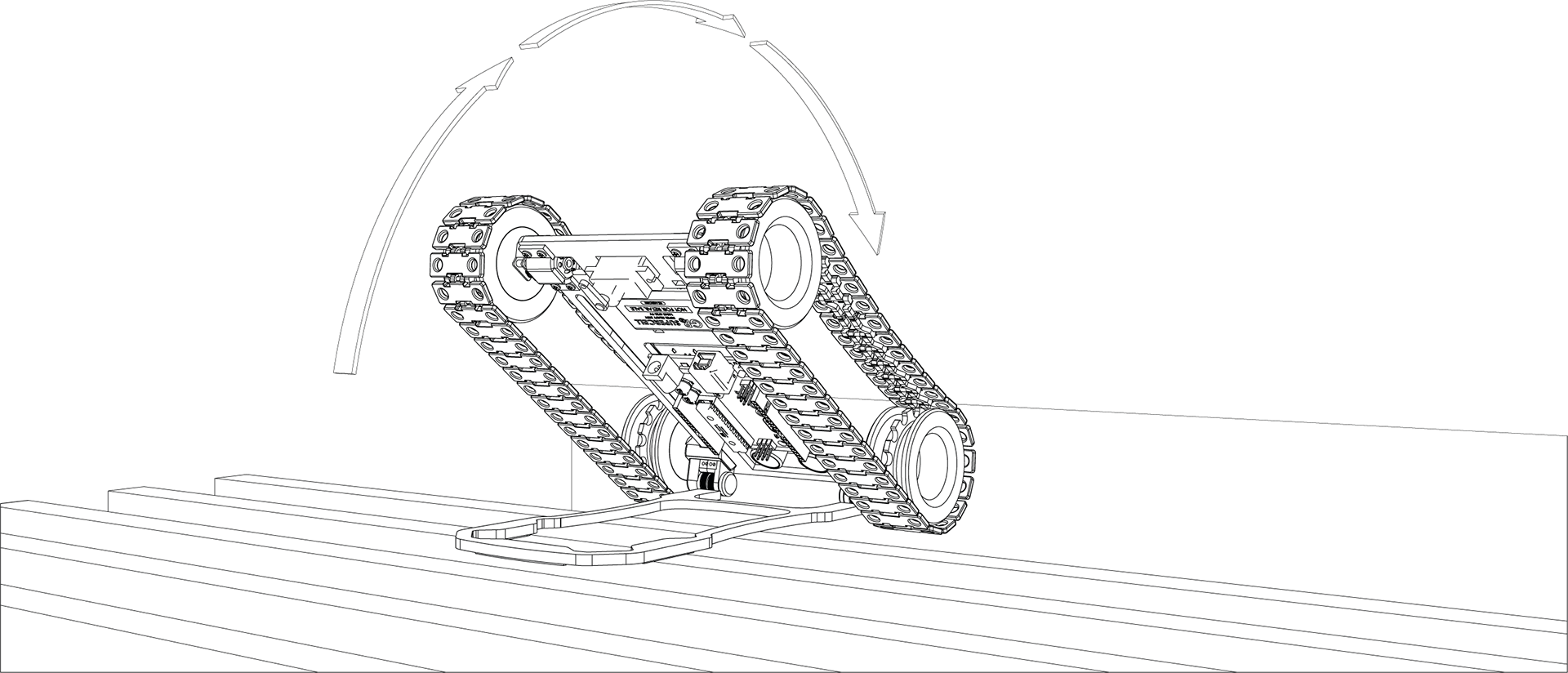
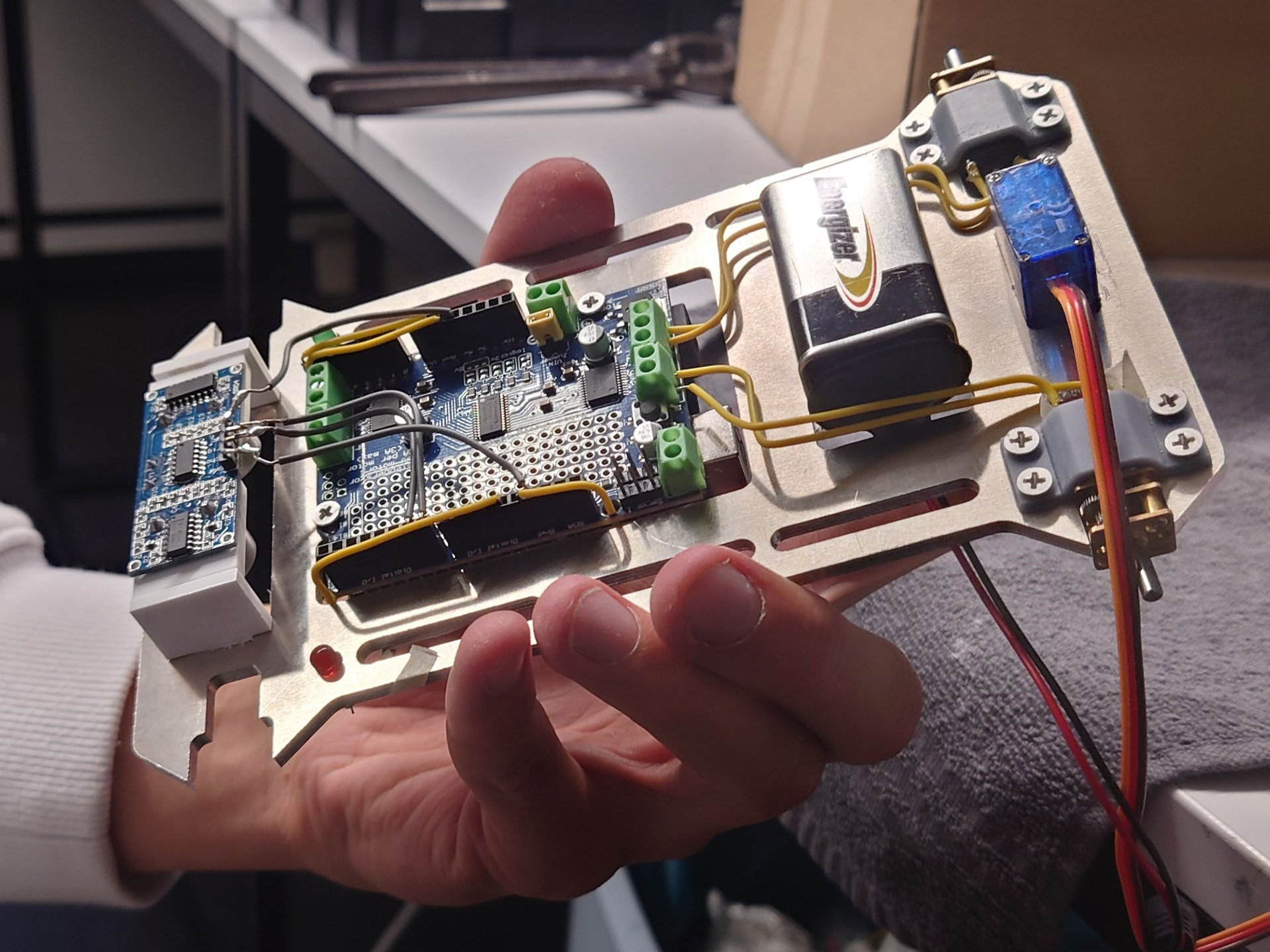
The vehicle concept relies on a track drive to generate as much contact surface and therefore traction as possible to overcome both the steep incline and the deep gaps in the middle section of the obstacle course. To negotiate the following ditch, we opted for a sensor-controlled approach, using ultrasonic distance measurement to detect the obstacle. As soon as the vehicle drives over the edge of the ditch, the distance is detected, the vehicle is stopped and the next step is initiated: A pre-tensioned bracket on the underside of the vehicle is released, pushing it up and forward, also causing the vehicle's centre of gravity to roll over and reach the opposite edge of the ditch. Now lying upside down, the chain drive now allows the vehicle to continue its journey to the finish line, where it comes to stop after a pre-calculated time.
Special attention was paid to lightweight construction and the ability to disassemble the vehicle into individual parts to meet sustainability criteria.
Special attention was paid to lightweight construction and the ability to disassemble the vehicle into individual parts to meet sustainability criteria.
Prototypes
During prototyping we tested out different base materials and arrangements of the different components such as motors and chips, to make the vehicle as stirdy as possible and put the center of gravity quite far to the back, so getting on the other side of the ditch would be more managable.
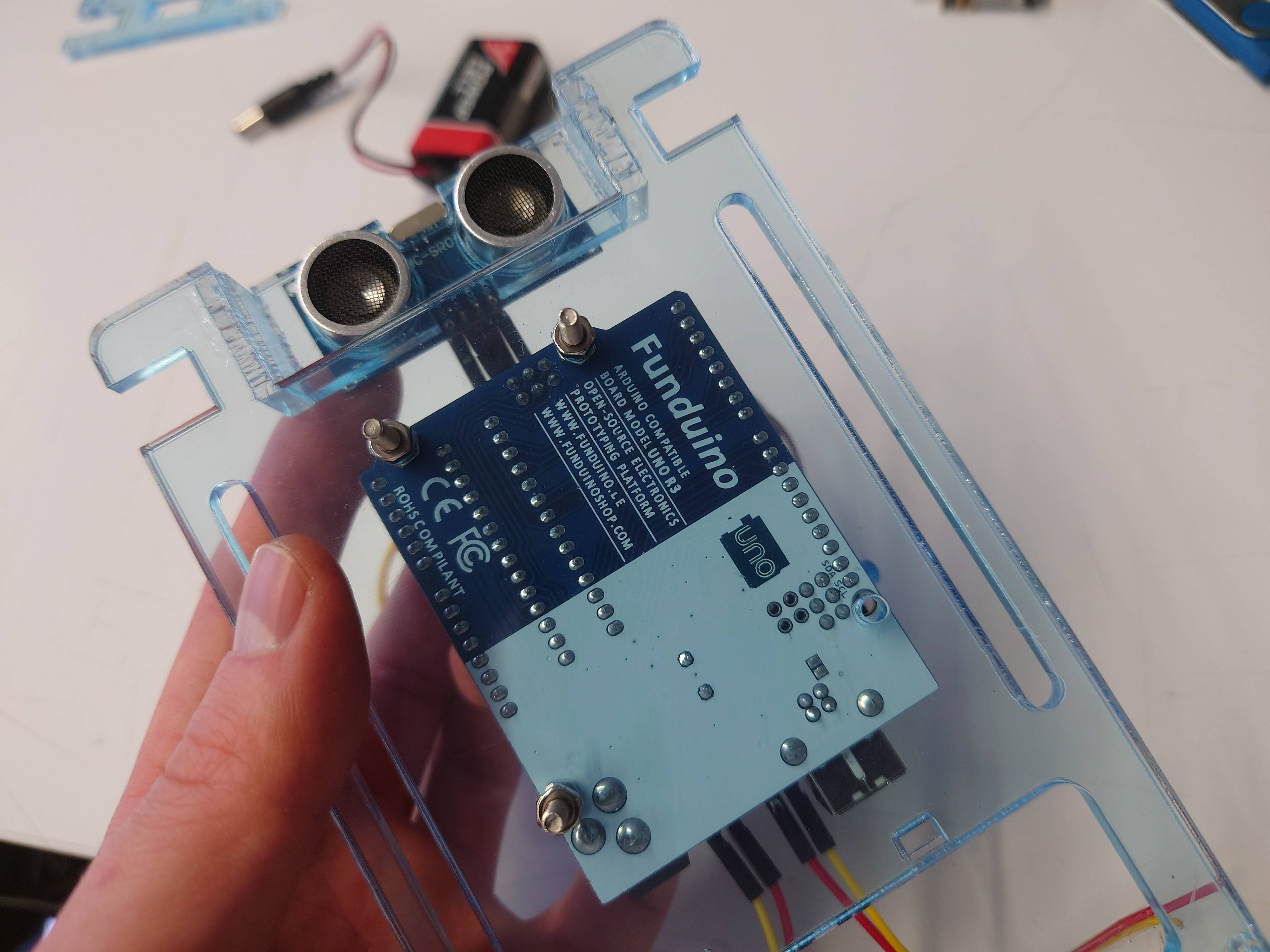
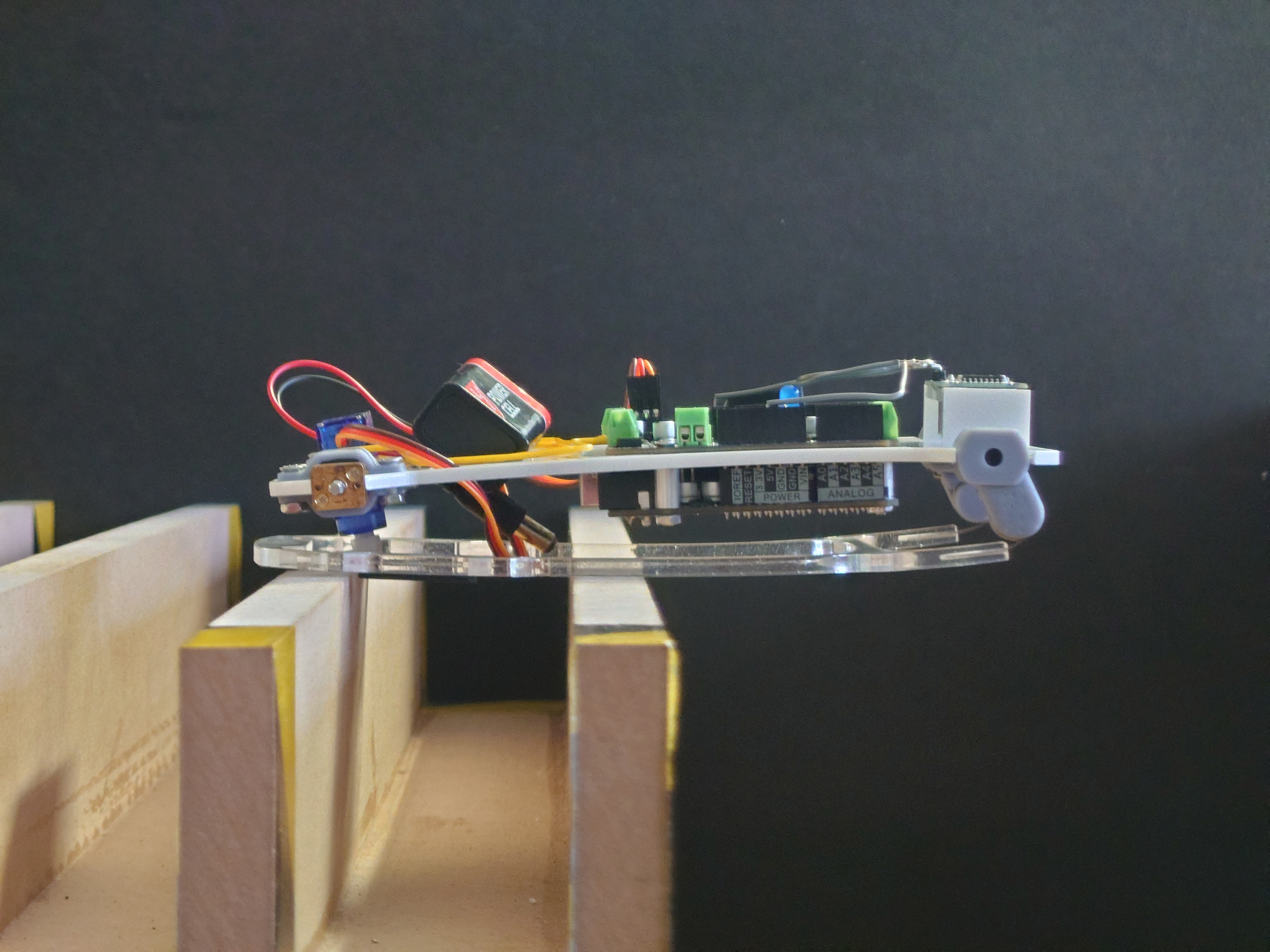
We started out with a baseplate lasercut from plexiglass and an offset mount for the ultrasound sensor. Part of the rims are made of plexiglass as well, while the rest of the wheels and chains are 3D-printed from resin.
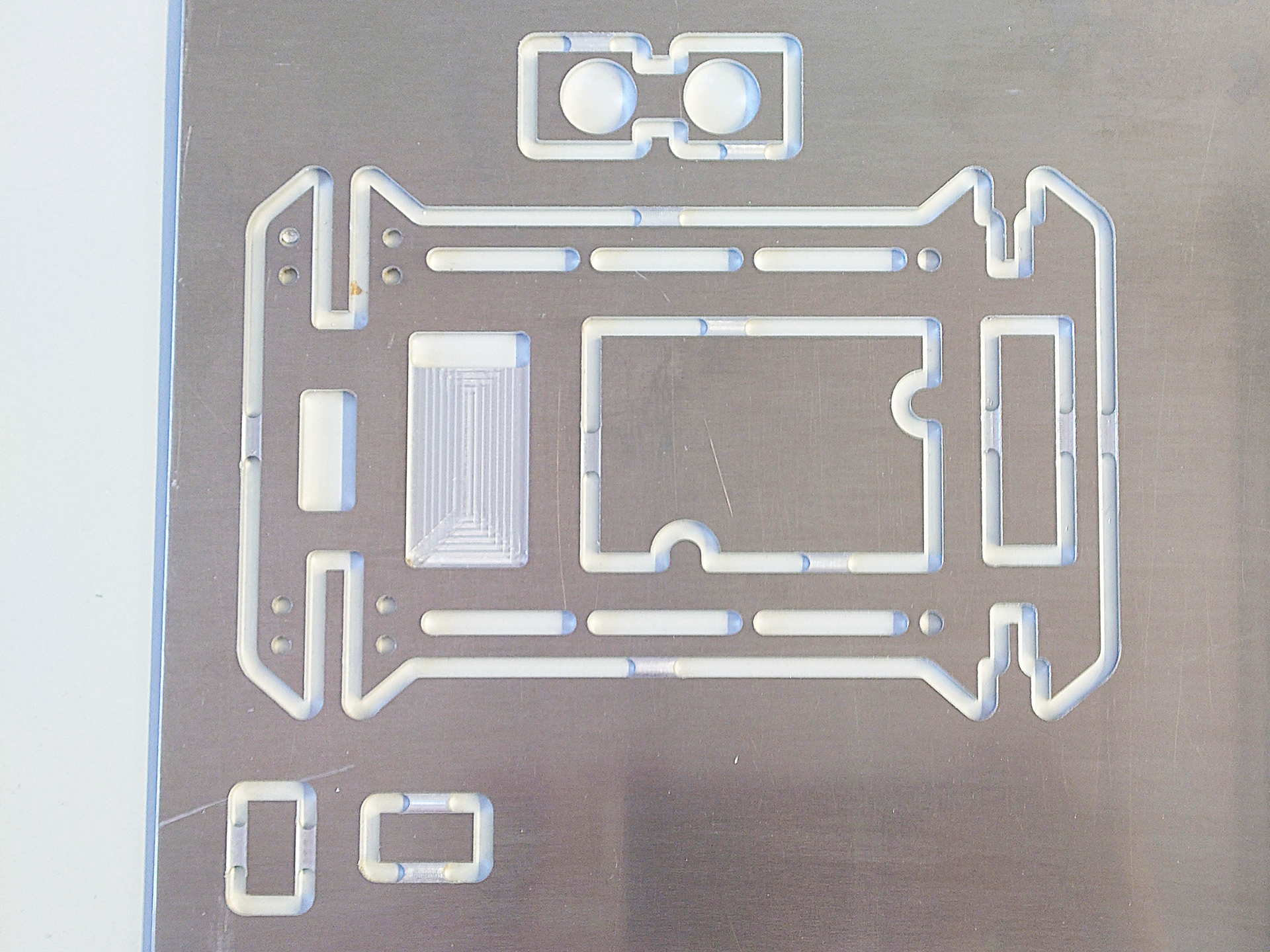
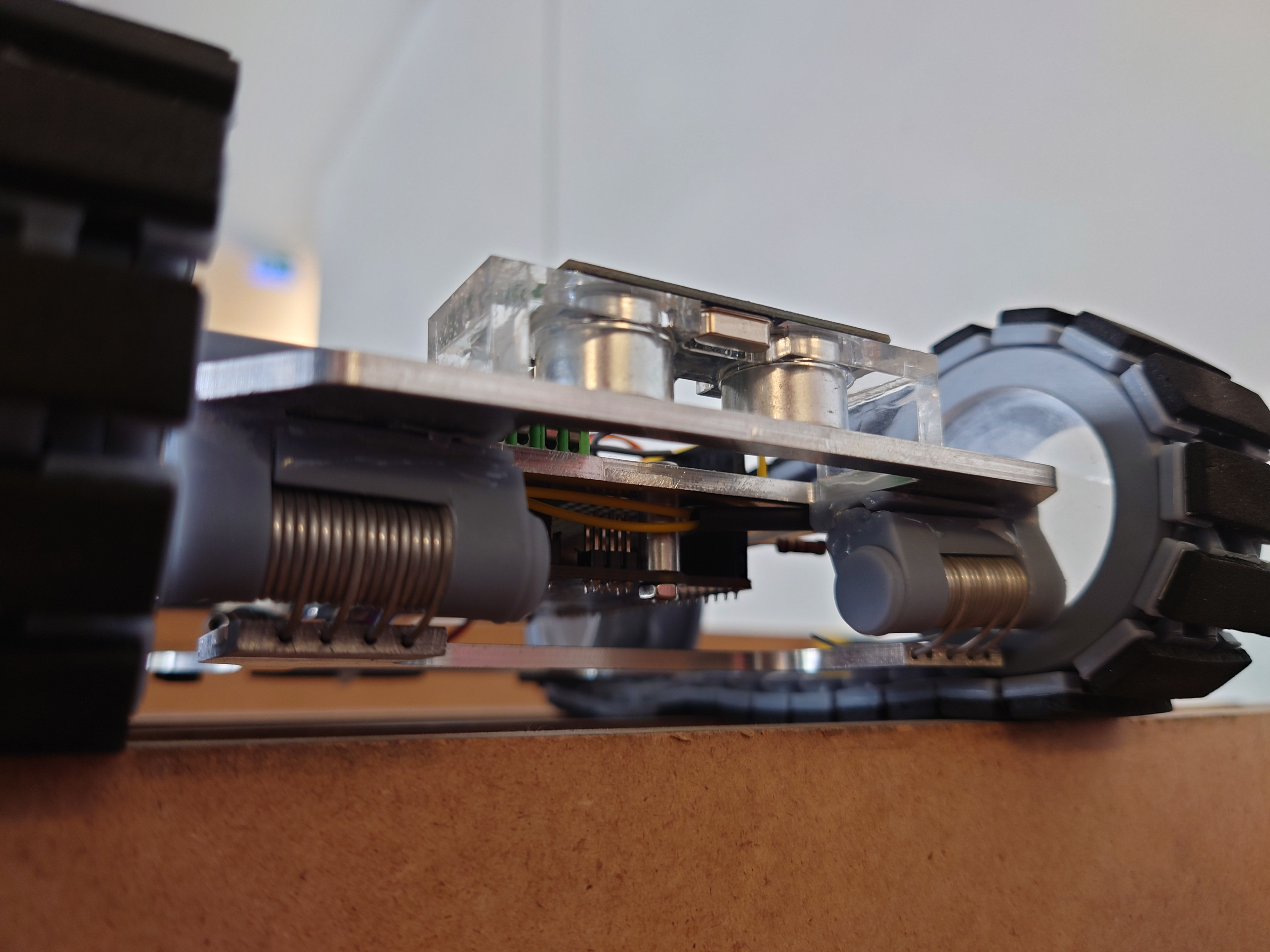
During the process we switched to aluminium as material for the base plate and the frame that we preloaded with springs to flip the vehicle over to the other side of the ditch, since plexiglass would'nt hold the power of the springs.
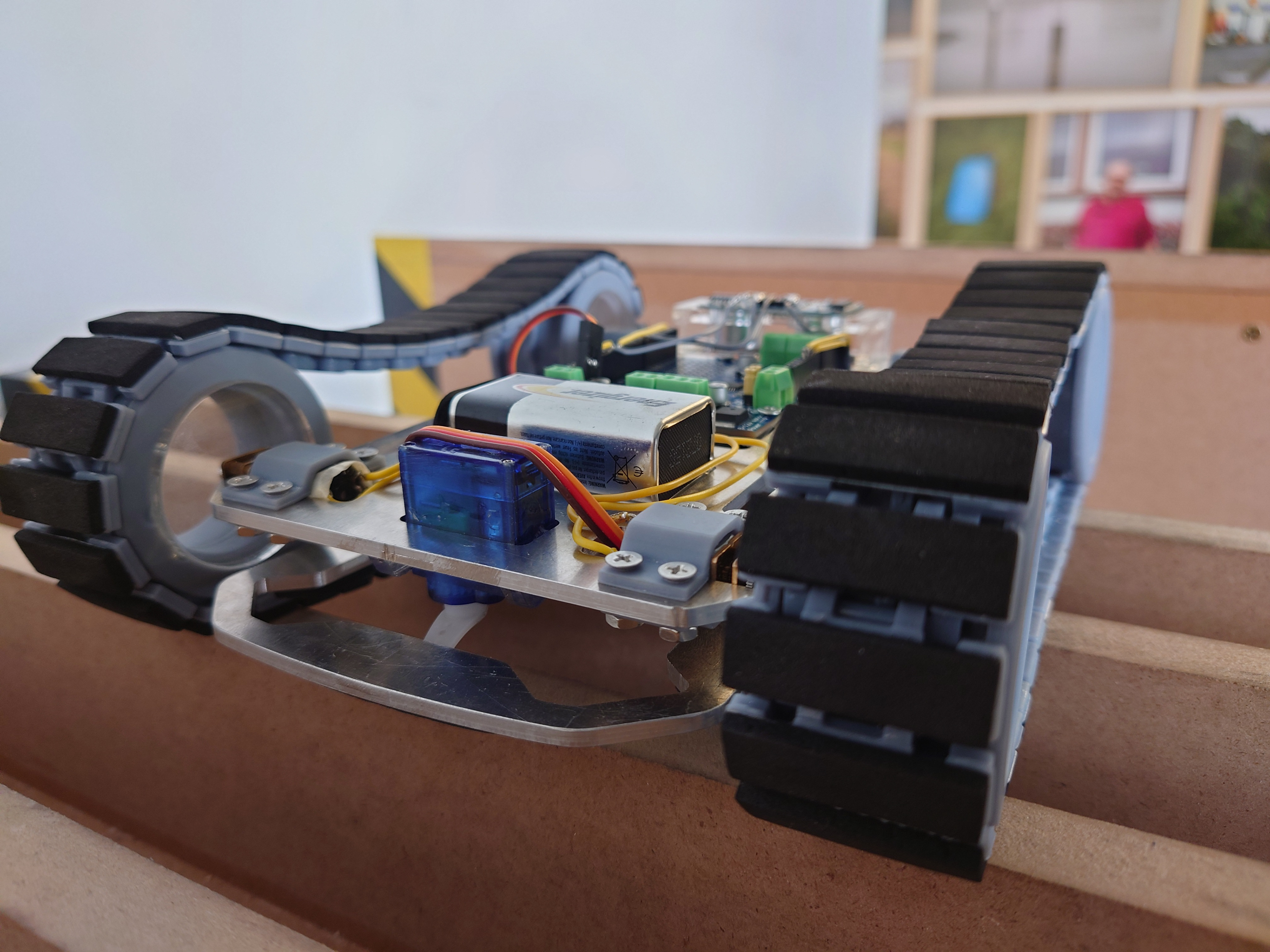

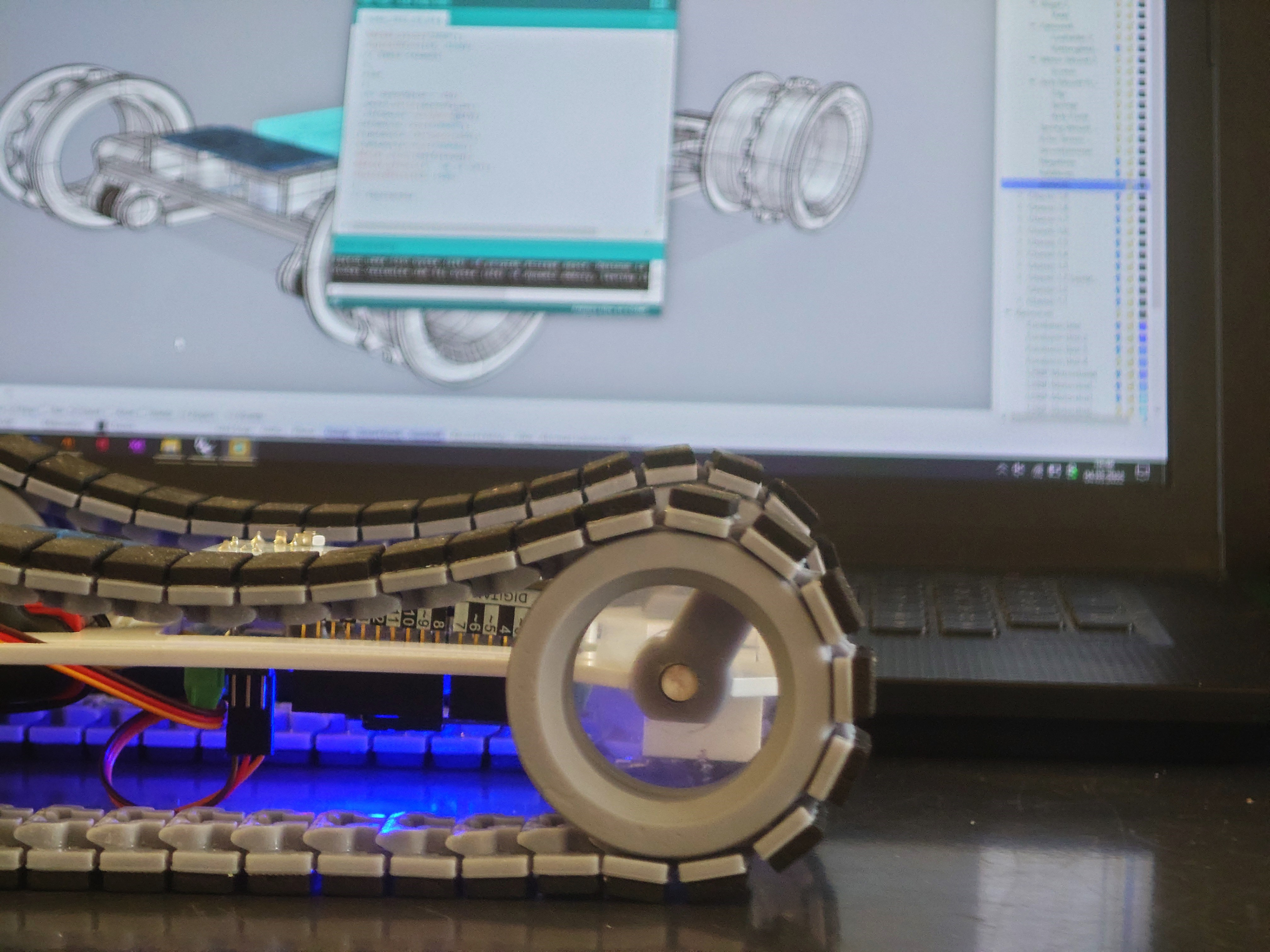
The wheels and chains also underwent a lot of different iteration states, tweaking the grip of the chains on the rims and making them as robust as possible while still saving weight and material. As a final measure of gaining more grip on the parcours surface we added a layer of rubber to the chain elements, successfully keeping the chain from slipping on the hardboard.
Later in the process the main task was to time the release of the springs after detecting the ditch with the ultrasound sensor, so the preloaded frame could flip the vehicle. The difficulty timing the stop of the vehicle at the edge as close to the tipping point as possible, maximising the flipping distance to reach the other side of the ditch.
Outcome